

Desarrollan un brazo robótico inspirado en el pulpo capaz de sentir, decidir y agarrar objetos bajo el agua
Inspirado en la extraordinaria inteligencia distribuida de los pulpos, un nuevo brazo robótico incorpora ventosas capaces de detectar el contacto, interpretar su entorno y decidir por sí mismo cómo sujetar objetos. El avance acerca la robótica submarina a un futuro en el que las máquinas podrán explorar y manipular entornos complejos con la delicadeza de un ser vivo.
Por Enrique Coperías, periodista científico

Un brazo robótico inspirado en los tentáculos de los pulpos manipula una lata bajo el agua utilizando ventosas equipadas con sensores táctiles capaces de detectar el contacto, medir la fuerza aplicada y adaptar de forma autónoma su estrategia de agarre. El sistema ha sido desarrollado por investigadores del Istituto Italiano di Tecnologia (IIT) para operar en entornos submarinos complejos. Cortesía: IIT-Istituto Italiano di Tecnologia
Los pulpos llevan millones de años perfeccionando una habilidad que sigue fascinando a los científicos: son capaces de manipular objetos complejos con una destreza extraordinaria gracias a unos brazos flexibles cubiertos de ventosas sensibles que prácticamente piensan por sí mismas. Ahora, un equipo del Istituto Italiano di Tecnologia (IIT), en Génova, ha dado un paso importante para trasladar ese talento biológico al mundo de la robótica.
Los investigadores han desarrollado un brazo robótico blando inspirado en los tentáculos de los pulpos que no solo puede agarrar objetos bajo el agua, sino también percibir dónde los toca, con qué fuerza entra en contacto e incluso decidir de forma autónoma cuál es la mejor estrategia para sujetarlos.
El avance, publicado en la revista Nature Machine Intelligence, podría abrir nuevas posibilidades para la exploración submarina, la arqueología acuática, el mantenimiento de infraestructuras marinas o la manipulación de organismos delicados en investigación biológica.
Uno de los grandes sueños de la robótica
Durante décadas, los ingenieros han intentado construir robots capaces de desenvolverse en entornos impredecibles. Sin embargo, la mayoría de las máquinas siguen dependiendo de estructuras rígidas y sistemas de control centralizados que funcionan bien en fábricas, pero tienen dificultades cuando se enfrentan a escenarios cambiantes, desordenados o desconocidos.
La naturaleza ofrece otra solución. Los pulpos poseen ocho brazos extremadamente flexibles con prácticamente infinitos grados de movimiento. Además, gran parte de la información sensorial que reciben sus ventosas se procesa localmente en los propios brazos, sin necesidad de enviar continuamente instrucciones al cerebro central. Esta combinación de flexibilidad física, control distribuido e inteligencia biológica les permite reaccionar con rapidez y adaptarse a situaciones complejas.
🗣️ «El pulpo representa uno de los ejemplos más fascinantes de inteligencia corporal distribuida en la naturaleza —explica el equipo liderado por Barbara Mazzolai, responsable del Laboratorio de Robótica Blanda Bioinspirada del IIT—. Su combinación de percepción distribuida y control periférico constituye una fuente extraordinaria de inspiración para diseñar robots más autónomos y adaptables».
Qué es una inteligencia distribuida
Cuando los neurocientíficos hablan de inteligencia distribuida en los cefalópodos se refieren a que el procesamiento de la información y la toma de decisiones no dependen solo de su cerebro central, sino que están repartidos por todo su sistema nervioso, especialmente en sus brazos. De los aproximadamente 500 millones de neuronas que posee un pulpo, más de dos tercios se encuentran fuera del cerebro, distribuidas en los ocho brazos. Cada brazo contiene complejas redes neuronales capaces de procesar información sensorial, coordinar movimientos y ejecutar acciones de forma relativamente autónoma.

Un pulpo interactúa con un buceador en aguas poco profundas, mostrando la extraordinaria destreza y capacidad exploratoria que han servido de modelo para la nueva generación de brazos robóticos bioinspirados. Foto de Digital Reach en Unsplash
Por qué los pulpos son una inspiración para la robótica
El nuevo brazo robótico reproduce varios de estos principios biológicos esbozados por Mazzolai. Mide unos 41 centímetros de longitud y tiene forma cónica, igual que un brazo real de pulpo. A lo largo de su superficie incorpora diez ventosas artificiales de distintos tamaños, desde 20 milímetros de diámetro en la base hasta 12 milímetros cerca de la punta.
La gran innovación reside en que cada ventosa integra sensores optoelectrónicos miniaturizados. En su interior se alojan pequeños diodos emisores de luz (LED) y fototransistores capaces de detectar cómo se deforma la estructura de silicona cuando entra en contacto con un objeto.
Cuando la ventosa toca una superficie, la luz se refleja de manera diferente según la intensidad y la dirección de la presión ejercida. Analizando esos cambios, el sistema puede calcular con notable precisión no solo si existe contacto, sino también la fuerza aplicada y el punto exacto donde se produce.
Las pruebas demostraron una sensibilidad muy elevada para detectar fuerzas pequeñas, con una respuesta prácticamente lineal entre la presión ejercida y la señal registrada por los sensores. Además, el sistema funcionó con la misma fiabilidad tanto en seco como completamente sumergido en agua.
🗣️ «Nuestro objetivo era integrar sensores táctiles directamente en las ventosas sin sacrificar la flexibilidad del brazo —señala el investigador Alessio Mondini, uno de los autores del trabajo. Y añade—: Queríamos que la percepción formara parte de la propia estructura del robot, igual que ocurre en los organismos vivos».
Cómo funciona el nuevo brazo robótico inspirado en un pulpo
Pero detectar información es solo una parte del problema. Lo realmente interesante es lo que ocurre después.
Los investigadores diseñaron una arquitectura de control inspirada en el sistema nervioso periférico del pulpo. En lugar de enviar todos los datos a un ordenador central para que tome decisiones, cada ventosa posee un pequeño circuito local capaz de reaccionar inmediatamente ante un contacto.
Cuando una ventosa detecta un objeto, activa de forma automática un reflejo local de succión que la fija a la superficie. Mientras tanto, la información recopilada se transmite a un nivel superior de control que analiza la situación general y decide cómo debe moverse el brazo completo.
Dependiendo de la posición del objeto, el sistema puede optar por doblar el brazo hacia delante, curvarlo hacia atrás o realizar movimientos de torsión similares a los que utilizan estos cefalópodos para envolver presas o explorar el entorno. Todo ello ocurre de manera autónoma, sin intervención humana directa.
Los autores describen este enfoque como una combinación entre reflejos locales rápidos y decisiones globales más elaboradas. Es un principio muy común en la naturaleza, donde muchas respuestas inmediatas no requieren la intervención constante del cerebro.
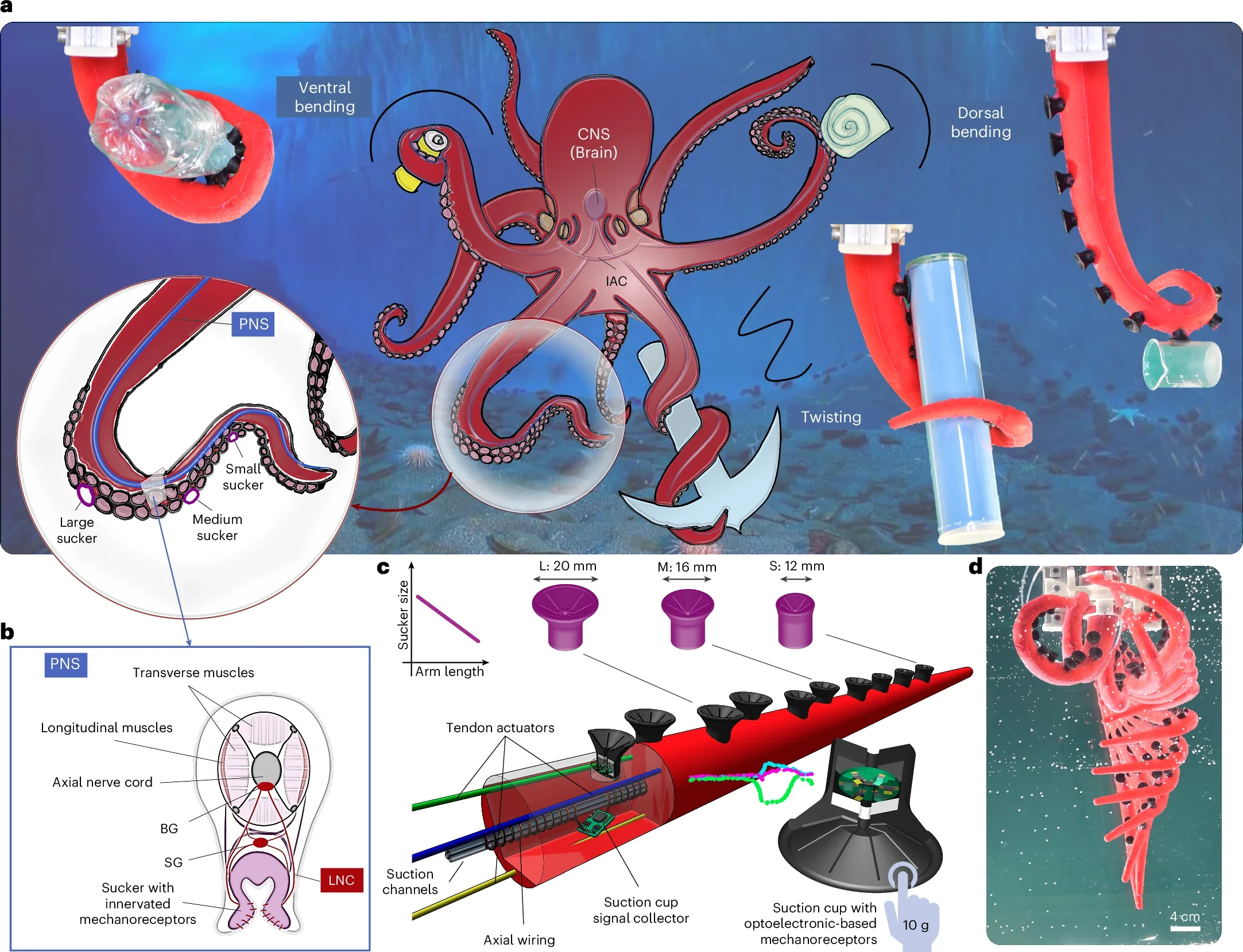
Esquema comparativo entre el sistema nervioso de un pulpo y el nuevo brazo robótico bioinspirado. Los investigadores han reproducido la combinación de control distribuido, percepción táctil y movimientos flexibles característica de los pulpos mediante ventosas inteligentes equipadas con sensores capaces de detectar el contacto, su dirección y la fuerza aplicada. La información se procesa localmente y se integra en un sistema jerárquico que permite al robot decidir de forma autónoma cómo agarrar objetos bajo el agua. Cortesía: IIT-Istituto Italiano di Tecnologia / Nature Machine Intelligence (2026).
Capaz de estimar el peso de los objetos
Las capacidades del sistema fueron más allá de la simple detección táctil.
En una de las pruebas, los investigadores utilizaron una pequeña carga suspendida mediante una de las ventosas. Gracias a la relación entre la deformación registrada y la fuerza ejercida, el robot fue capaz de estimar el peso de un objeto bajo el agua con una precisión sorprendente.
También consiguió identificar la orientación de cilindros y otros objetos relativamente pequeños, adaptando de modo automático la forma de agarre más adecuada para cada caso. En algunos experimentos, el brazo inició un movimiento exploratorio, detectó un objeto mientras estaba en marcha y modificó su estrategia sobre la marcha para atraparlo correctamente.
Según los investigadores, esta capacidad de cambiar de comportamiento en tiempo real resulta especialmente valiosa en entornos donde la visibilidad es reducida o la información previa es limitada.
🗣️ «Los sensores no solo permiten detectar contactos, sino que proporcionan información suficiente para generar comportamientos adaptativos —explica Edoardo Sinibaldi, coautor del estudio. Y continúa—: La combinación entre percepción distribuida y control jerárquico hace posible que el brazo interactúe de forma más natural con su entorno».
Aplicaciones en el océano y más allá
Uno de los aspectos más prometedores del proyecto es su funcionamiento en ambientes acuáticos.
Muchos robots submarinos actuales dependen de pinzas rígidas que pueden dañar organismos delicados o resultar poco eficaces al manipular objetos de formas irregulares. En cambio, la estructura blanda del brazo desarrollado por el IIT permite interacciones mucho más suaves.
Los investigadores creen que tecnologías de este tipo podrían utilizarse en el futuro para recoger muestras biológicas frágiles, manipular corales sin dañarlos, recuperar restos arqueológicos sumergidos o intervenir en infraestructuras submarinas complejas.
Además, el diseño es modular y escalable. Las ventosas pueden añadirse o redistribuirse fácilmente, lo que permitiría desarrollar brazos más largos, sistemas con múltiples tentáculos o robots capaces de realizar tareas cooperativas inspiradas en la coordinación de los ocho brazos de un pulpo real.

TENTÁCULOS DE PRECISIÓN
Vídeo demostrativo del brazo robótico blando inspirado en el pulpo desarrollado por el Istituto Italiano di Tecnologia. Equipado con ventosas inteligentes y sensores táctiles distribuidos, el sistema puede detectar contactos, calcular la intensidad y dirección de las fuerzas aplicadas y adaptar de forma autónoma su estrategia de agarre, incluso en entornos submarinos complejos y poco estructurados. Cortesía: IIT-Istituto Italiano di Tecnologia
La robótica bioinspirada aprende de los animales
El trabajo se enmarca dentro de una tendencia creciente en ingeniería conocida como robótica bioinspirada. En lugar de diseñar máquinas desde cero, los investigadores estudian soluciones desarrolladas por la evolución durante millones de años y las adaptan a sistemas artificiales.
El pulpo se ha convertido en una de las principales fuentes de inspiración para este campo debido a su extraordinaria combinación de flexibilidad, sensibilidad táctil y control distribuido. Reproducir todas esas capacidades sigue siendo un desafío enorme, pero este nuevo brazo robótico inspirado en el pulpo demuestra que la distancia entre la biología y la tecnología empieza a reducirse.
Aún quedan pasos importantes antes de ver este tipo de sistemas trabajando de forma habitual en el fondo marino. Sin embargo, el prototipo italiano muestra que los robots del futuro podrían parecerse menos a máquinas industriales rígidas y más a organismos vivos capaces de sentir, adaptarse y reaccionar de manera inteligente a lo que sucede a su alrededor. Y, en ese camino, los pulpos siguen siendo algunos de los mejores maestros que la naturaleza puede ofrecer.▪️(9-junio-2026)

PREGUNTAS & RESPUESTAS: Robots Bioinspitados y Pulpos
🐙 ¿Qué es un robot blando o soft robot?
Es un robot construido con materiales flexibles que imitan las propiedades mecánicas de los tejidos biológicos y pueden interactuar de forma segura con objetos delicados.
🐙 ¿Por qué se ha inspirado en los pulpos?
Porque los pulpos combinan una extraordinaria flexibilidad física con un sistema nervioso distribuido capaz de procesar información directamente en los brazos.
🐙 ¿Puede funcionar bajo el agua?
Sí. El sistema ha sido diseñado específicamente para operar en ambientes acuáticos y mantener sus capacidades de detección y agarre.
🐙 ¿Qué detectan las ventosas inteligentes?
Pueden identificar la presencia de contacto, la fuerza aplicada, la dirección de la presión y la posición relativa de los objetos.
🐙 ¿Para qué podría utilizarse esta tecnología?
Entre otras aplicaciones, para exploración submarina, arqueología marina, biología oceánica, mantenimiento de infraestructuras sumergidas y futuras plataformas robóticas bioinspiradas.
EN RESUMEN
El nuevo brazo robótico desarrollado por el Istituto Italiano di Tecnologia demuestra que la combinación de robótica blanda, sensores táctiles distribuidos y control inspirado en la biología puede producir máquinas capaces de sentir, adaptarse y actuar de forma autónoma. El trabajo acerca la ingeniería a uno de los grandes objetivos de la robótica moderna: crear sistemas que interactúen con el mundo físico con la misma naturalidad y eficiencia que los organismos vivos.

Información facilitada por el Istituto Italiano di Tecnologia
Fuente: Del Dottore, E., Adhami, R., Shahabi, E. et al.Peripheral control enabled by distributed sensing in an octopus-inspired soft robotic arm for autonomous underwater grasping. Nature Machine Intelligence (2026). DOI: https://doi.org/10.1038/s42256-026-01230-y