

Tenis de mesa a toda máquina: el brazo robótico que juega como un profesional
Un robot del MIT está revolucionando el tenis de mesa o pimpón con golpes rápidos, precisos y con estilo humano. Gracias a inteligencia artificial y control predictivo, ya compite al nivel de un profesional.
Por Enrique Coperías

El brazo robótico de pimpón del MIT representa un avance real en el desarrollo de robots ágiles e inteligentes. Gracias al uso combinado de IA, visión artificial, modelado físico y control óptimo, este sistema logra una sincronización perfecta entre percepción y acción. Cortesía: Nguyen et al.
En una esquina del Laboratorio de Robótica del Instituto Tecnológico de Massachusetts (MIT), en Estados Unidos, se libra una batalla silenciosa entre la inteligencia artificial (IA) y las leyes de la física. Allí, investigadores del prestigioso instituto han desarrollado un brazo robótico capaz de jugar al tenis de mesa o, dicho más vulgarmente, pimpón o ping-pong, y no solo devolver pelotas, sino hacerlo con potencia, precisión y estilo.
En un deporte históricamente reservado a los reflejos humanos, esta máquina ha empezado a romper barreras con golpes que replican fielmente los de un jugador profesional.
Como afirman los autores de la investigación, los ingenieros David Nguyen, Kendrick D. Cancio y Sangbae Kim, el avance no se trata de una mera curiosidad técnica. Detrás de cada pelotazo hay una combinación de hardware ultraligero, algoritmos de control predictivo, sensores de alta velocidad y una comprensión profunda de la física del movimiento.
Una tasa de aciertos de casi el 90% en golpes complejos
En conjunto, conforman un sistema que puede ejecutar golpes complejos como topspins (efectos piedra), chops (golpes cortados) y drives (goles de derecha) con una tasa de acierto superior al 88% y velocidades de salida de hasta 14 metros por segundo.
El pimpón robótico no es nuevo. En la última década se han desarrollado varias máquinas capaces de devolver pelotas, pero la mayoría compartía limitaciones significativas: brazos robóticos pesados, diseños poco versátiles o sistemas demasiado lentos para responder en tiempo real. Algunos recurrían a enormes estructuras tipo pórtico que desplazaban la raqueta de pimpón sobre la mesa, sacrificando agilidad por cobertura.
La propuesta del MIT rompe con ese paradigma. El núcleo del sistema es un brazo robótico antropomórfico de cinco grados de libertad, derivado del MIT Humanoid Arm. Este modelo fue rediseñado con una filosofía clara: maximizar la aceleración reduciendo al mínimo la inercia. Para ello, los motores se colocaron cerca del hombro del brazo, alejados del extremo que sostiene la raqueta.
¿El resultado? Un brazo de apenas 3 kilos de peso que puede acelerar su extremo a más de 300 300 m/s², una cifra comparable a los movimientos de un jugador profesional de tenis de mesa en pleno partido.
Ver, predecir y golpear
Además, cuenta con actuadores de alta densidad de par que permiten alcanzar fuerzas y velocidades suficientes para generar golpes potentes, controlando tanto la posición como la orientación de la raqueta en tiempo real. Todo esto se logró sin añadir complejidad innecesaria: el sistema prescinde de una sexta articulación porque, a efectos prácticos, rotar la pala sobre su eje normal no afecta al contacto con la pelota.
Detectar la posición de una pelota de tenis de pesa que se mueve a más de 10 m/s no es tarea fácil. Para ello, el equipo empleó seis cámaras de captura de movimiento OptiTrack, que siguen la trayectoria de pelotas recubiertas con cinta retroreflectante.
Este pequeño truco altera mínimamente el comportamiento del objeto, pero garantiza una detección extremadamente precisa: menos de un milímetro de error y una frecuencia de actualización de 120 veces por segundo.

Simulación de una mesa de tenis de mesa generada para probar la eficacia del brazo robótico. Cortesía: Nguyen et al.
Inteligencia artificial aplicada al tenis de mesa robótico
La verdadera magia comienza tras la detección. En cuestión de milisegundos, el sistema debe predecir la trayectoria completa de la pelota, incluyendo su rebote sobre la mesa. Para eso, se recurre a un modelo físico simplificado del vuelo del balón, que considera la resistencia del aire, la gravedad y la energía que se pierde en el bote.
Aunque el modelo asume que la pelota no lleva efecto (giro), las pruebas demostraron que la predicción es suficientemente precisa en la mayoría de los casos.
Cada observación se transforma en un estado inicial —posición y velocidad— desde el cual se proyecta hacia adelante la trayectoria de la pelota. Así, el sistema determina el punto y momento exactos donde se debe realizar el golpe. La predicción se actualiza constantemente y se filtra con un promedio móvil para evitar oscilaciones indeseadas.
El poder del control predictivo por modelo (MPC)
Con la predicción en mano, el brazo debe moverse. Pero no de cualquier forma. La trayectoria del brazo se calcula resolviendo un problema de control óptimo: encontrar la secuencia de posiciones, velocidades y aceleraciones que lleven a la pala a encontrarse con la pelota en el momento justo, con la orientación y velocidad deseadas.
En palabras de Nguyen, «esto implica cumplir múltiples restricciones físicas, como los límites de movimiento de cada articulación, y minimizar el esfuerzo total para lograr un movimiento suave y eficaz».
Para adaptarse a cambios repentinos —por ejemplo, si la pelota rebota en una dirección inesperada—, el sistema se basa en un enfoque llamado control predictivo por modelo (MPC). En lugar de planificar una única vez, el sistema recalcula la trayectoria varias veces por segundo.
Tras comparar distintas estrategias, el equipo del MIT optó por una variante conocida como horizonte fijo, que parte siempre de una posición de preparado estándar y replanifica el movimiento según la nueva predicción. Esta técnica permite tiempos de cálculo muy bajos (3 miliseegundos en promedio) y tasas de convergencia altísimas (más del 99%).
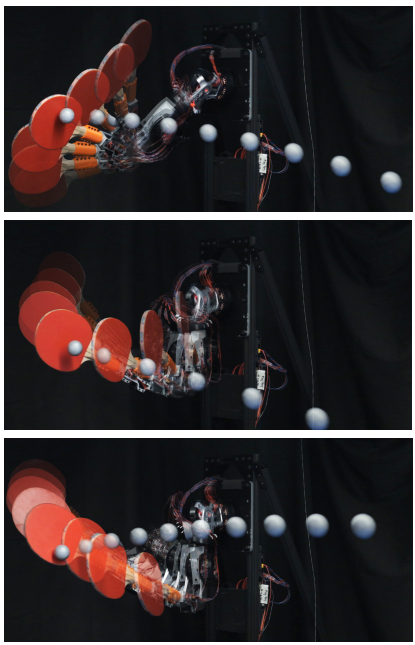
Golpes de hardware loop (arriba), drive (centro) y chop (abajo) con la trayectoria de salida de la pelota mostrada. Cortesía: Nguyen et al.
Golpes reales: topspin, backspin y drives
Para evitar movimientos bruscos entre trayectorias sucesivas, se utiliza una transición suave de 20 milisegundos basada en curvas tipo S. Así, el brazo no solo es rápido, sino también fluido, lo que mejora la precisión del golpeo y reduce el desgaste mecánico.
Como podemos leer en el repositorio en línea de acceso abierto arXiv, el sistema no solo golpea la pelota: lo hace con intención y estilo. Para comprobar su versatilidad, los investigadores entrenaron al robot en tres tipos de golpeo típicos del tenis de mesa, que requiere una orientación y velocidad diferente de la raqueta:
✅ El loop, un tipo de golpe en el tenis de mesa que imprime topspin —un efecto de rotación a la pelota—, lo que permite devolverla con una trayectoria curva y agresiva hacia el rival.
✅ El drive, un golpe plano ofensivo que se caracteriza por su velocidad y fuerza. Suele incorporar un ligero topspin para generar una trayectoria tensa y difícil de devolver.
✅ El chop, un golpe defensivo que se utiliza para devolver pelotas con efecto cortado o backspin. Se ejecuta moviendo la pala de arriba hacia abajo en el momento del contacto, haciendo que la pelota gire hacia atrás.
En busca de la sexta articulación
En cada prueba, se lanzaron 150 pelotas con diferentes golpes y movimientos. El brazo robótico logró impactar correctamente más del 88% de las veces en los tres tipos de golpes. Las velocidades alcanzadas por la pelota después del impacto oscilaron entre 7 y 14 m/s, dependiendo del estilo y la fuerza aplicada.
Los investigadores también analizaron con detalle la precisión del sistema: errores de posición menores a 7,5 cm (el radio de la raqueta), errores de velocidad inferiores a 2 m/s y desviaciones angulares menores a 10° en la mayoría de los casos.
Curiosamente, las desviaciones más importantes se produjeron en los ángulos menos controlados por el diseño actual del brazo, lo que sugiere que una sexta articulación en la muñeca podría mejorar aún más la precisión.
Visión para el futuro: hacia un robot que juegue partidos completos
Pese a su rendimiento impresionante, el sistema aún no puede jugar partidos completos. No toma decisiones estratégicas ni apunta a una zona específica de la mesa. Tampoco evalúa la posición del rival ni adapta sus golpes a situaciones tácticas. Pero las bases están puestas: el robot de pimpón tiene la capacidad física y computacional de ejecutar golpes realistas, precisos y variados.
Los próximos pasos del proyecto apuntan en varias direcciones:
✅ Ampliar el espacio de juego para que el brazo pueda cubrir toda la mesa.
✅ Mejorar el sistema de visión para poder usar pelotas estándar de ping-pong sin cinta reflectante, lo que implica integrar cámaras RGB y algoritmos de visión por computadora más sofisticados.
✅ Estimar el efecto de la pelota en tiempo real, lo que permitirá prever trayectorias más complejas y responder con golpes aún más precisos.
✅ Por último, los investigadores planean incorporar un modelo de colisión avanzado entre la raqueta y la pelota que permita no solo devolver la bola, sino apuntar estratégicamente a zonas específicas del campo contrario. En conjunto, estas mejoras acercan cada vez más al sistema a un jugador de tenis de mesa autónomo.
Un paso más cerca del atleta robótico
Más allá del espectáculo, este desarrollo representa un hito en la robótica de alta velocidad y la manipulación dinámica. Las técnicas desarrolladas —como el control predictivo aplicado a movimientos rápidos y precisos, o la integración de hardware ligero y potente— tienen aplicaciones potenciales en campos que van desde la manufactura inteligente hasta la asistencia médica robótica.
«Aunque el tenis de mesa no salvará vidas, este tipo de control podría utilizarse en situaciones difíciles de búsqueda y rescate donde un robot más general, como un humanoide, podría necesitar interceptar un objeto», vaticina Nguyen.
Según Cancio, «los mismos principios que mueven el robot de tenis de mesa podrían aplicarse en robótica médica, manufactura flexible, drones autónomos o sistemas de rehabilitación asistida.
Pero, en el fondo, como señala Kim, también hay una dimensión lúdica en este proyecto. Ver a una máquina inteligente devolver pelotas con una elegancia casi humana es una experiencia que mezcla asombro, admiración y un toque de humor. ¿Quién sabe? Quizá algún día, en un torneo internacional de tenis de mesa, un robot del MIT se enfrente a un campeón mundial humano... y lo venza con un perfecto golpe cruzado. ▪️
Fuente: David Nguyen, Kendrick D. Cancio, Sangbae Kim. High Speed Robotic Table Tennis Swinging Using Lightweight Hardware with Model Predictive Control. ArXiv (2025). DOI: https://doi.org/10.48550/arXiv.2505.01617