

RoboFalcon2.0, el robot con alas de pájaro que logra despegar solo: un avance en drones biomiméticos
Un halcón mecánico fabricado en China ha logrado lo que parecía imposible: batir las alas como un ave real y alzar el vuelo sin ayuda. RoboFalcon2.0 abre una nueva era para los drones biomiméticos que imitan la naturaleza.
Por Enrique Coperías

El primer RoboFalcon, antecesor del actual prototipo, ya ensayaba una estrategia de alas reconfigurables para imitar el vuelo de crucero de las aves. Cortesía: Science Advances (2025). DOI: 10.1126/sciadv.adx046
El despegue es quizá el momento más crítico del vuelo de cualquier criatura. Para un avión, implica desplegar una enorme potencia en pocos segundos; para un insecto, un zumbido casi instantáneo; para un ave, una coreografía con las alas que combina fuerza, geometría y ligereza.
Reproducir ese instante en un robot volador ha sido, durante décadas, un reto casi imposible. Hasta ahora, los drones con alas batientes eran capaces de planear o imitar a los pájaros en vuelos rectos, pero necesitaban siempre un empujón inicial: un salto, una catapulta o la mano del investigador que los lanzaba al aire.
Un grupo de ingenieros de la Universidad Politécnica del Noroeste en Xi’an (China) ha presentado ahora un prototipo que rompe esa barrera. Bautizado como RoboFalcon2.0, este robot con aspecto de ave rapaz no solo bate las alas, sino que las pliega, las barre hacia delante y las extiende en una secuencia coordinada que imita a los pájaros cuando vuelan despacio. Gracias a este movimiento inédito, descrito como aletear–barrer–plegar (FSF, por sus siglas en inglés), logra despegar desde el suelo sin ayuda y mantener un vuelo controlado a baja velocidad.
Cómo los robots aprenden del vuelo animal para despegar desde el suelo
La clave del éxito no reside tanto en el motor como en la mecánica de las alas robóticas. Las aves poseen articulaciones que les permiten doblarlas y moverlas hacia delante durante el aleteo descendente. Esa combinación genera un fuerte empuje y, al mismo tiempo, una fuerza de sustentación capaz de mantener al animal en el aire incluso cuando no tiene velocidad suficiente.
Los robots aéreos, sin embargo, han estado limitados casi siempre a un movimiento simple: aletear hacia arriba y hacia abajo alrededor de un eje fijo. Esta restricción les impedía imitar las maniobras de los pájaros al despegar o al frenar para posarse. RoboFalcon2.0 introduce un sofisticado sistema de mecanismos reconfigurables que traduce la potencia de un único motor en tres gestos distintos y coordinados: aleteo, barrido y plegado.
El resultado es un ala que se comporta como un organismo vivo: se extiende para generar sustentación en el descenso, se barre hacia delante para añadir empuje y se pliega en la subida para reducir la resistencia. Es exactamente lo que hacen gaviotas, cuervos o halcones cuando vuelan despacio o parten desde el suelo.
RoboFalcon2.
Demostración del principio mecánico en el que se basa el robot. Crédito: Science Advances (2025). DOI: 10.1126/sciadv.adx0465.
Características técnicas del dron RoboFalcon2.0
El prototipo tiene la escala de un ave mediana. Con 1,2 metros de envergadura y unos 800 gramos de peso, recuerda al tamaño de un halcón peregrino, de ahí su nombre. Su esqueleto combina segmentos equivalentes al húmero, el radio y la mano, recubiertos por una membrana textil similar a la de los murciélagos.
👉 El cuerpo está fabricado en fibra de carbono para maximizar la ligereza y la resistencia, y en su interior se aloja un motor eléctrico brushless (o sin escobillas) —un tipo de motor que funciona con imanes y un controlador electrónico en lugar de escobillas mecánicas— capaz de mover las alas a una frecuencia de hasta 7,5 hercios, comparable a la de un ave real de esas dimensiones.
Lo verdaderamente novedoso, sin embargo, son dos piezas bautizadas como decoplador de plegado y decoplador de barrido. Son conjuntos de bielas y palancas que, en sincronía con el motor principal, deciden cuándo y cuánto se doblan las alas hacia atrás o se empujan hacia delante.
Este diseño, fruto de años de experimentación, permite que un único motor gobierne tres movimientos al mismo tiempo, con el apoyo de pequeños servomotores para ajustar amplitudes. El ahorro en peso y energía es fundamental: más actuadores implicarían un robot demasiado pesado para volar.
Pruebas en túnel de viento: resultados del experimento
Antes de dejarlo volar por un hangar, los investigadores sometieron al RoboFalcon2.0 a pruebas en túnel de viento. Allí midieron cómo variaban la sustentación, el empuje y el momento de cabeceo al modificar la amplitud del barrido de las alas.
Los resultados fueron claros: cuanto más se adelantaban las alas en el batido descendente, mayor era la sustentación y, sobre todo, mayor la capacidad de levantar el morro, algo esencial para abandonar el suelo. Las simulaciones CFD confirmaron lo observado: el barrido hacia delante intensifica la formación de un vórtice en el borde de ataque del ala, una corriente de aire giratoria de baja presión que aumenta la fuerza ascensional.
Esa misma estrategia la emplean los pájaros en vuelo lento de manera natural. En vuelos a baja velocidad, el movimiento del ala no solo apunta hacia abajo, sino también hacia delante, inclinando el plano de batido y generando más empuje vertical. RoboFalcon2.0, con su mecanismo FSF, logra lo mismo gracias a la pura mecánica.
El primer vuelo autónomo
Con los datos del túnel de viento, los ingenieros programaron un vuelo experimental en un hangar de quince metros de altura. El robot-pájaro se colocó en el suelo, erguido sobre dos patas de fibra de carbono que mantenían el cuerpo inclinado a 45 grados, tal como hacen muchas aves antes de despegar.
Al activar el motor, las alas comenzaron a describir el ciclo FSF. En apenas tres aleteos, el robot se elevó por sí mismo, describiendo una trayectoria curva hacia arriba. Una cámara captó la secuencia, y las imágenes recordaban, de manera sorprendente, al despegue de un ave rapaz como el águila pescadora.
El vuelo no era perfecto. A medida que aumentaba la velocidad, el control de cabeceo se volvía inestable y el aparato tendía a levantar demasiado el morro. Sin cola ni superficies móviles adicionales, el sistema no podía compensar del todo esa tendencia. Sin embargo, para el propósito principal —despegar sin asistencia y volar a baja velocidad—, el experimento fue un éxito rotundo.
Limitaciones, consumo energético y retos de los drones con alas batientes
El propio equipo admite que el RoboFalcon2.0 aún está lejos de ser un dron práctico. El despegue consume grandes cantidades de energía: hasta 400 vatios de potencia en los momentos más intensos, lo que limita la autonomía de vuelo. Además, el control en vuelo rápido es deficiente, porque las alas, al aumentar la velocidad del aire, generan momentos de cabeceo difíciles de contrarrestar.
Las aves reales solucionan estos problemas con un repertorio que los ingenieros aún no han conseguido imitar: torsión de plumas, uso activo de la cola como timón, cambios en el centro de gravedad desplazando las patas o incluso modificando la rigidez del ala. RoboFalcon2.0 carece de todo ello.
Para vuelos prolongados y maniobras más complejas, será necesario añadir superficies de control adicionales, como un estabilizador trasero, o dispositivos que permitan desplazar el centro de masas. Pero como banco de pruebas, el prototipo abre una vía inédita en la robótica aérea.
Lecciones de la naturaleza
El interés de este experimento no está solo en la robótica, sino en la biología del vuelo. Comprender cómo un mecanismo artificial logra despegar imitando el batido de las aves ayuda a desentrañar las claves del vuelo animal.
El estudio confirma que el barrido hacia delante en el descenso no es un detalle secundario, sino un factor crucial para generar sustentación y control a bajas velocidades.
El trabajo también muestra hasta qué punto la naturaleza aprovecha soluciones eficientes. Con apenas unos gramos de músculo y pluma, un gorrión logra lo que a los ingenieros les exige engranajes, carbono y cientos de vatios. La comparación sirve para admirar, de nuevo, la economía evolutiva del vuelo animal.
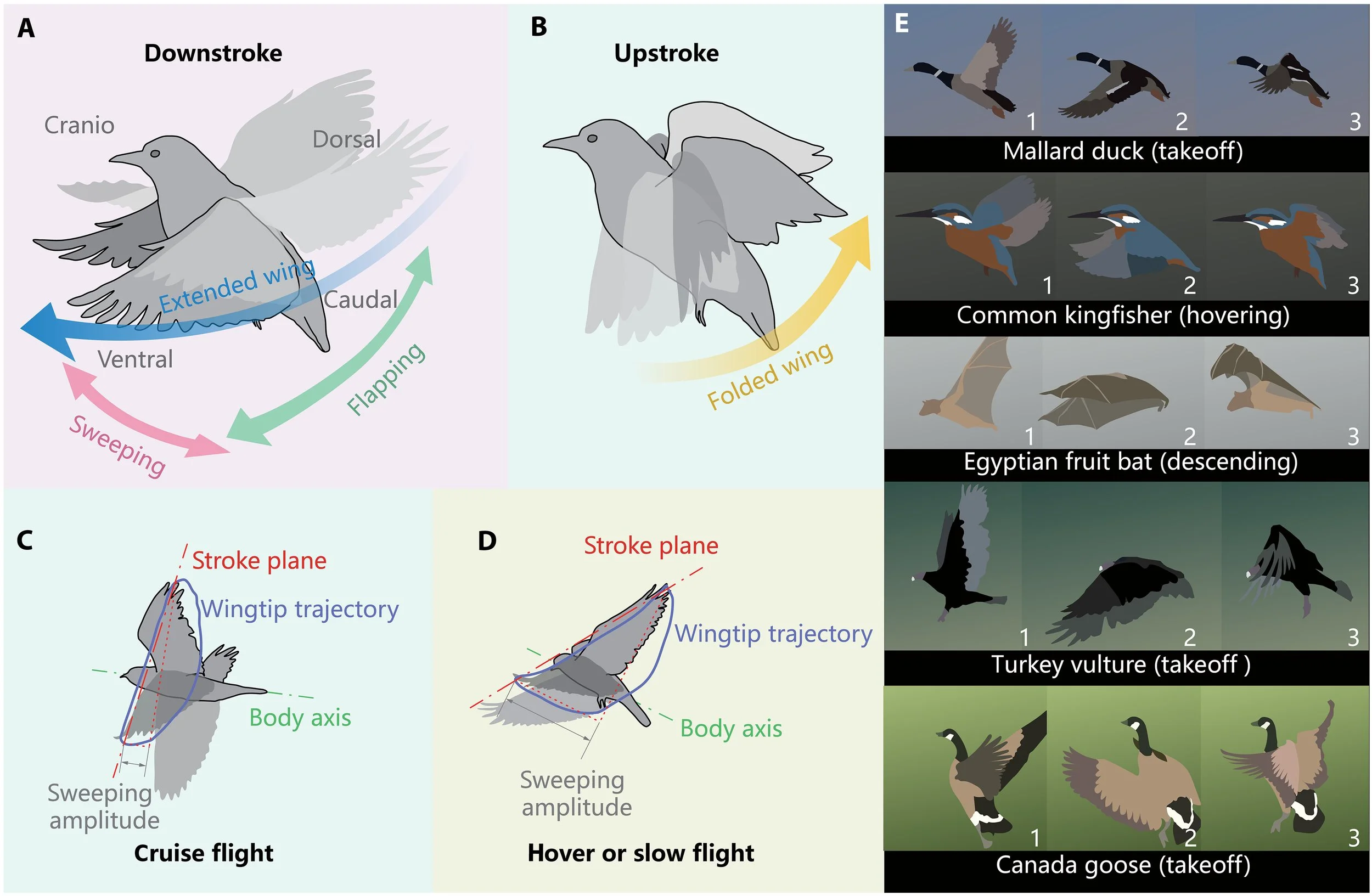
El aleteo de las aves cambia según la velocidad. En vuelo lento, baten con las alas extendidas hacia abajo y las recogen en la subida. En crucero, el plano de batido es más vertical; en vuelo más despacio, se inclina y aumenta la amplitud para ganar sustentación. Cortesía: Science Advances (2025). DOI: 10.1126/sciadv.adx046
Aplicaciones en vigilancia, rescate y exploración científica
Los autores subrayan que este tipo de avances podrían aplicarse en drones inspirados en aves destinados a misiones muy concretas: entrar en espacios reducidos, despegar desde el suelo sin pista de lanzamiento, maniobrar entre árboles o edificios.
Un robot que pueda elevarse como un ave, sin necesidad de hélices ruidosas, tendría ventajas en operaciones de vigilancia, rescate o exploración científica en entornos frágiles.
Además, los mecanismos de alas reconfigurables podrían trasladarse a otros campos de la aeronáutica, por ejemplo en planeadores capaces de modificar su geometría en vuelo para adaptarse a distintas fases de la misión.
Lo que este robot-pájaro enseña sobre la biología del vuelo
El RoboFalcon2.0 no es todavía un dron listo para volar en la naturaleza. Es, más bien, un recordatorio de lo difícil que es alcanzar con máquinas lo que los animales hacen con una gracia ancestral. Aun así, representa un hito: por primera vez, un robot con alas batientes ha logrado despegar desde el suelo sin ayuda, utilizando una técnica de vuelo propia de las aves.
En palabras de los propios investigadores, se trata de «una solución ingenieril a un problema poco explorado». Y, como ocurre con muchos avances científicos, su valor no está tanto en lo que resuelve hoy, sino en lo que inspira para mañana. El siguiente paso será combinar este aleteo complejo con colas biomiméticas, plumas artificiales o sistemas de control más finos.
Lo que está claro es que la robótica aérea ha cruzado un umbral. Si los drones comenzaron siendo hélices con cámara, cada vez más se acercan a la diversidad de la aviación natural. Y en ese camino, el RoboFalcon2.0 ha demostrado que imitar a un pájaro que despega desde el suelo ya no es un sueño imposible, sino un horizonte alcanzable. ▪️
Fuente: Ang Chen et al. Flapping-wing robot achieves bird-style self-takeoff by adopting reconfigurable mechanisms. Science Advances (2025). DOI: 10.1126/sciadv.adx0465