

Robot con patas para explorar Marte: cómo la robótica autónoma puede acelerar la búsqueda de vida alienígena y recursos espaciales
Un robot con patas capaz de tomar decisiones por sí mismo promete revolucionar la exploración de Marte. La autonomía podría multiplicar la velocidad de los descubrimientos en la búsqueda de vida extraterrestre y recursos clave para futuras misiones tripuladas.
Por Enrique Coperías, periodista científico

Imagen conceptual de dos robots cuadrúpedos autónomos analizan rocas en la superficie de Marte, utilizando espectroscopía láser y sensores avanzados para identificar posibles bioseñales y recursos minerales sin intervención humana directa. Crédito: IA-DALL-E-RexMolón Producciones
Un avance en exploración espacial que podría cambiar la ciencia planetaria
En la superficie de Marte, cada decisión cuenta. Un róver avanza unos metros, se detiene, toma imágenes, envía datos a la Tierra y espera. A veces durante horas. O días. La exploración espacial, tal como la conocemos, es paciente, metódica… y lenta.
Pero ¿y si los robots del futuro no tuvieran que esperar instrucciones humanas para cada paso? ¿Y si pudieran recorrer el terreno, elegir varias rocas interesantes y analizarlas por sí mismos, en una sola jornada?
Este es el tipo de preguntas que se hace un equipo de investigadores europeos en un estudio publicado en la revistaFrontiers in Space Technologiessobre un robot con patas capaz de explorar de forma semiautónoma entornos similares a los de la Luna y Marte. Su conclusión es clara: el cambio de paradigma podría ser radical.
¿Por qué la exploración de Marte es tan lenta?
La exploración planetaria, como es el caso de la marciana, está condicionada por un factor físico insalvable: la velocidad de la luz. Las señales entre la Tierra y Marte tardan entre 3 y 22 minutos en llegar en un solo sentido. Esto hace imposible controlar un robot en tiempo real.
Por eso, las misiones actuales funcionan como un intercambio lento: los científicos envían órdenes, el robot ejecuta tareas y devuelve datos al día siguiente. Este proceso limita enormemente la velocidad de exploración. Los róveres actuales, como el Curiosity y el Perseverance, recorren distancias relativamente cortas —decenas o cientos de metros al día— y analizan un objetivo cada vez.
🗣️ «Las misiones en la superficie de otros planetas siguen siendo extremadamente cautelosas: los retrasos en la comunicación y las limitaciones en la transmisión de datos obligan a planificar cada movimiento con mucha antelación», afirma Gabriela Ligeza, del Departamento de Ciencias Ambientales, en la Universidad de Basilea (Suiza), en un comunicado de Frontiers.
Sin embargo, muchos de los lugares más interesantes, donde podría haber restos de vida o recursos espaciales útiles, están en terrenos difíciles: pendientes, cráteres, zonas rocosas o regiones con hielo.
«En Marte, un robot puede recorrer apenas unos cientos de metros al día, lo que dificulta obtener una visión geológica diversa del entorno», dice Ligeza.
Ahí es donde entran en juego nuevos enfoques.
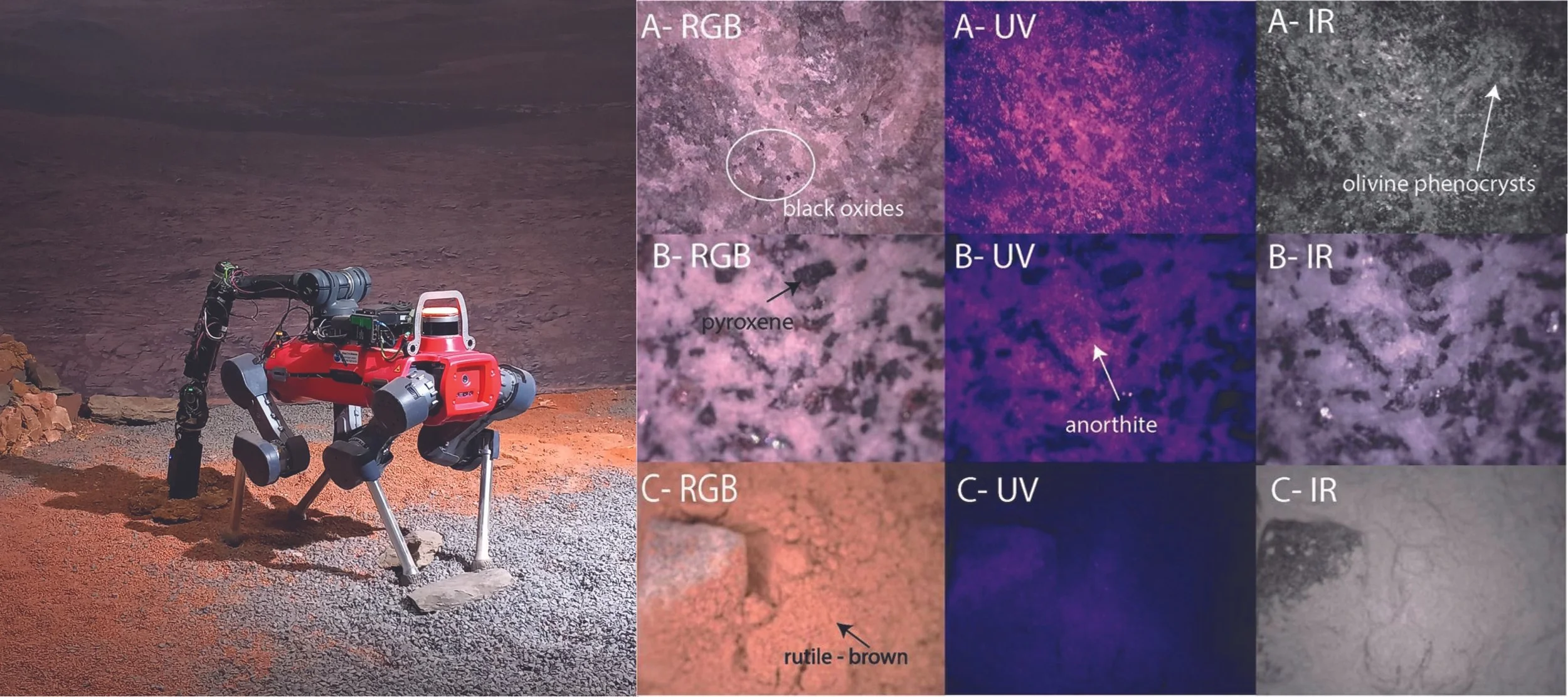
A la izquierda, el robot cuadrúpedo realiza mediciones autónomas de una roca utilizando un microscopio multiespectral (MICRO) y un espectrómetro Raman; a la derecha, ejemplos de imágenes obtenidas por MICRO que revelan la textura de distintos materiales análogos lunares en RGB, ultravioleta (UV) e infrarrojo (IR). Cortesía: Dr. Gabriela Ligeza
La innovación: un robot cuadrúpedo autónomo
El protagonista del estudio es ANYmal, un robot cuadrúpedo similar a un perro mecánico desarrollado por ingenieros del Robotic Systems Lab, en la ETH Zurich. A diferencia de los róveres tradicionales con ruedas, ANYmal puede desplazarse por terrenos irregulares con mayor facilidad.
Este robot no solo camina. Lleva incorporado un brazo robótico equipado con dos herramientas principales:
✅ Un microscopio multiespectral (MICRO), capaz de analizar la textura de las rocas.
✅ Un espectrómetro Raman, que permite identificar su composición mineral mediante láser.
En otras palabras: el robot no solo ve, sino que interpreta.
Exploración multiobjetivo: el cambio de paradigma
Ligeza y sus colegas compararon dos formas de trabajar:
1️⃣ Modo tradicional: analizar una roca cada vez, con supervisión humana continua.
2️⃣ Modo innovador: seleccionar varios objetivos desde el principio y dejar que el robot los explore de forma autónoma.
En el segundo caso, el robot recibe una lista de puntos de interés y ejecuta toda la secuencia por sí solo: se desplaza, coloca el brazo, toma imágenes y analiza la composición de cada muestra.
«Queríamos probar un enfoque diferente: un robot autónomo capaz de investigar varios objetivos por sí mismo, sin depender constantemente de instrucciones desde la Tierra», comenta Ligeza
Este enfoque, llamado exploración multiobjetivo semiautónoma, busca algo esencial: ganar tiempo sin perder rigor científico.
«En lugar de analizar una única roca bajo supervisión continua, el robot puede desplazarse entre distintos puntos y realizar mediciones de forma autónoma», explica esta experta, que también trabaja en la ESA.
Experimento: simular Marte y la Luna en la Tierra
Para probar la idea, los investigadores recrearon entornos similares a Marte y la Luna en un laboratorio en Suiza.
✅ En el Marte artificial colocaron rocas como yeso, carbonatos o basalto con azufre, materiales que en el planeta rojo podrían conservar señales de vida pasada.
✅ En la simulación lunar, en condiciones de baja iluminación y sombras extremas, utilizaron rocas como la anortosita y la dunita, relevantes para futuras misiones de exploración espacial y explotación de recursos.
El robot tuvo que identificar, analizar y clasificar estas muestras como si estuviera en otro mundo.
«El robot se desplazó de forma autónoma hasta los objetivos seleccionados, desplegó sus instrumentos y devolvió imágenes y espectros para su análisis», detalla Ligeza.
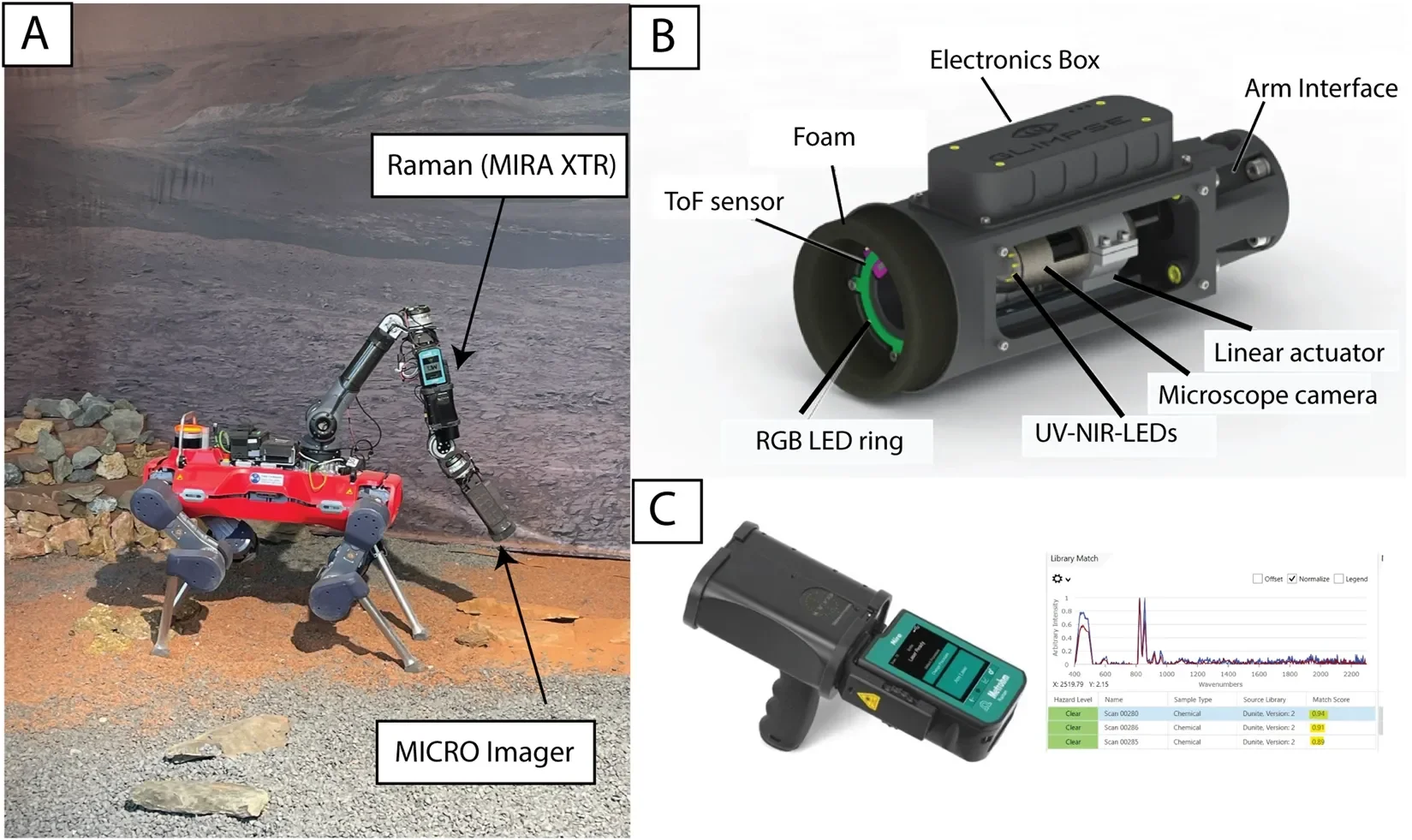
(A) Robot cuadrúpedo ANYmal D equipado con un espectrómetro Raman (MIRA XTR) en el antebrazo y un microscopio MICRO en el extremo del brazo; (B) detalle del microscopio MICRO y sus componentes; y (C) espectrómetro Raman portátil de Metrohm con un ejemplo de espectros obtenidos. Cortesía: Dr. Gabriela Ligeza
Resultados: más rapidez sin perder rigor científico
Los resultados muestran un equilibrio interesante entre velocidad y precisión. En el modo autónomo (tipo Marte), el robot logró identificar correctamente hasta el 100 % de los objetivos en algunos casos, y al menos dos de cada tres en la mayoría. En el modo tradicional (tipo Luna), también alcanzó el 100 %, pero con un coste: más tiempo y menor eficiencia operativa.
La diferencia es significativa. Una misión autónoma podía completarse en unos 15 minutos, mientras que la supervisada necesitaba más del doble.
«Las misiones semiautónomas resultaron mucho más rápidas: entre 12 y 23 minutos, frente a los 41 minutos necesarios en una operación guiada por humanos», dice Ligeza. Eso sí, el enfoque automático tiene debilidades. En algunos casos, el brazo del robot no apuntaba exactamente al objetivo, lo que reducía la calidad de los datos o hacía fallar la identificación. «A pesar de esa mayor velocidad, el robot mantuvo una alta tasa de éxito científico», añade.
Clave científica: combinar imagen y química
Uno de los hallazgos más importantes del estudio es la complementariedad de los instrumentos:
✅ El microscopio permite observar la textura: granos, fracturas, estructuras.
✅ El espectrómetro Raman identifica los minerales con gran precisión.
Cuando uno falla, el otro puede compensar. Por ejemplo, una imagen borrosa puede no revelar mucho, pero el análisis químico puede confirmar de qué está hecha la roca.
«Los resultados demuestran que incluso cargas útiles compactas pueden cumplir plenamente los objetivos científicos», comenta Ligeza. Esta combinación es especialmente relevante para la astrobiología: buscar señales de vida pasada en Marte o en otros mundos.
Aplicaciones: de Marte a otras lunas del Sistema Solar
Aunque los robots actuales ya tienen cierta autonomía —por ejemplo, para evitar obstáculos—, siguen dependiendo en gran medida de decisiones humanas.
Este estudio apunta a un futuro diferente: robots autónomos capaces de planificar campañas científicas completas, decidir qué analizar y en qué orden, y hacerlo sin esperar instrucciones constantes.
«Este tipo de sistemas podría acelerar de forma significativa la prospección de recursos y la búsqueda de bioseñales en otros mundos», comenta Ligeza.
Las implicaciones van más allá de Marte:
✅ En lunas como Europa y Encélado, donde la comunicación es aún más lenta, la autonomía será imprescindible.
✅ En misiones a Titán, la luna de Saturno, los robots deberán operar casi sin intervención humana.
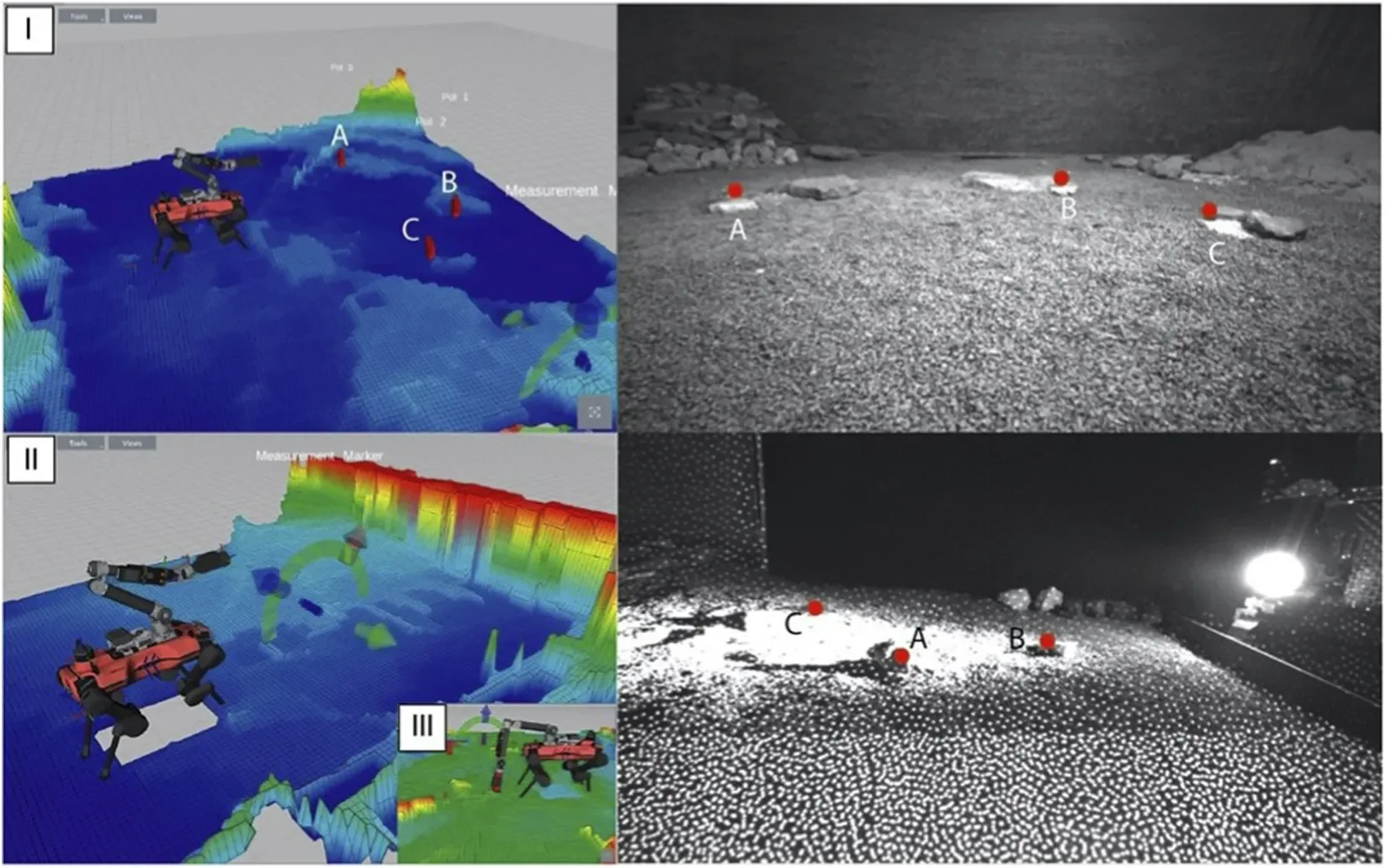
La imagen muestra la interfaz de control de misión y el proceso de selección de objetivos en los ensayos análogos de Marte y la Luna. En (I), el panel izquierdo presenta el entorno virtual de la misión marciana, mientras que a la derecha se observa la imagen de navegación con tres objetivos (A–C) seleccionados simultáneamente. En (II), el panel izquierdo corresponde a la misión lunar, con selección secuencial de objetivos (primero A, luego B y finalmente C) en la imagen de la derecha. En (III) se ilustra el despliegue del microscopio MICRO mediante el brazo robótico. Cortesía: Dr. Gabriela Ligeza
El futuro: robots que toman decisiones científicas
Los autores de este trabajo también plantea mejoras futuras. Entre ellas, pueden mencinarse las siguientes:
✅ Sistemas que detecten automáticamente objetivos interesantes.
✅ Algoritmos que evalúen la calidad de los datos y repitan mediciones si es necesario.
✅ Integración de múltiples robots trabajando en equipo.
La idea final es clara: pasar de robots que ejecutan órdenes a robots que toman decisiones. «En lugar de esperar instrucciones para cada paso, los robots podrían desplazarse, analizar rocas y recoger datos de forma mucho más ágil», comenta Ligeza.
Una nueva era en la exploración espacial
La exploración espacial de otros mundos siempre ha sido una carrera contra el tiempo, la distancia y la incertidumbre. Cada avance en autonomía reduce esa brecha.
Este robot con patas no es solo una curiosidad tecnológica. Representa un cambio de enfoque: explorar más rápido, con más inteligencia y con menos dependencia de la Tierra. En un futuro no tan lejano, los robots podrían recorrer Marte —o la Luna— como auténticos geólogos autónomos, tomando decisiones sobre la marcha.
«Podríamos hacer ciencia mucho más rápido en la superficie de otros planetas», concluye Ligeza. Y quizá, entre esas decisiones, encuentren algo que llevamos décadas buscando: señales de vida más allá de nuestro planeta.▪️
PREGUNTAS&RESPUESTAS: Robots y Exploración Espacial
🚀 ¿Qué ventaja tienen los robots con patas frente a los róveres?
Pueden moverse mejor en terrenos irregulares, acceder a zonas difíciles y explorar más áreas.
🚀 ¿Qué son las bioseñales?
Son indicios químicos o físicos que podrían indicar la presencia de vida pasada o presente.
🚀 ¿Por qué es importante la autonomía en Marte?
Porque la comunicación con la Tierra es lenta, lo que impide el control en tiempo real.
🚀 ¿Este tipo de robots cuadrúpedos ya se usa en misiones reales?
Todavía están en fase experimental, pero podrían incorporarse en futuras misiones espaciales.
Información facilitada por Frontiers
Fuente: Ligeza G., Arm P., Bontognali T. R. R., Bickel V T., Kolvenbach H., Kuhn N. J. and Kehl F. Semi-autonomous exploration of martian and lunar analogues with a legged robot using a Raman-equipped robotic arm and microscopic imager. Frontiers Space Technologies (2026) DOI: 10.3389/frspt.2026.1741757