

La mano robótica que detecta calor, peso y presión: así es la MOTIF Hand
Descubre cómo una mano robótica multisensorial podría revolucionar la interacción entre robots y objetos reales. Tecnología háptica, sensores térmicos, inteligencia artificial y manipulación avanzada en un solo diseño.
Por Enrique Coperías
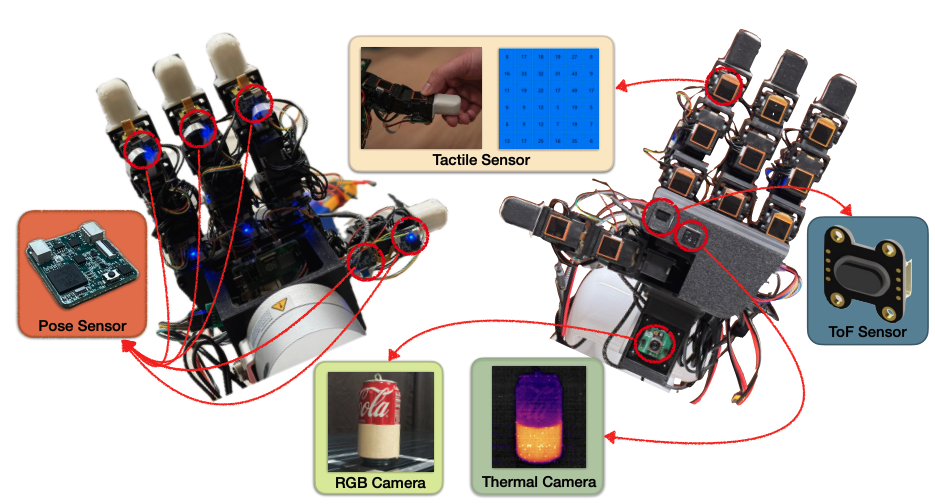
Reverso (izquierda) y anverso (derecha) de la MOTIF Hand diseñada por ingenieros del laboratorio SLURM. Los componentes clave de la mano aparecen etiquetados, como las cámaras térmica FLIR Lepton 3.5 y la RGB; y los sensores táctiles. Cortesía: arXiv (2025) - DOI: 10.48550/arxiv.2506.19201
En los últimos años, la robótica ha vivido una transformación silenciosa pero radical. Si hace una década los brazos robóticos diseñados para trabajar en las fábricas apenas eran capaces de repetir movimientos preprogramados, hoy la investigación en inteligencia artificial y sensores ha abierto la puerta a una nueva generación de robots capaces de interactuar con el mundo físico de forma más parecida a los humanos.
Pero todavía queda mucho camino por recorrer. Uno de los mayores desafíos a los que se enfrentan los ingenieros en robótica es la manipulación robótica hábil de objetos con múltiples dedos, como hacemos las personas casi sin pensarlo al cocinar, atornillar algo o simplemente coger un vaso caliente.
Ahí es donde entra en juego la nueva creación del laboratorio SLURM de la Universidad del Sur de California, en Estados Unidos: la extremidad MOTIF Hand. Con un nombre que parece sacado de una película de ciencia ficción, pero que en realidad es un acrónimo de Multimodal Observation with Thermal, Inertial, and Force Sensors, esta mano robótica avanzada representa un avance notable en el campo de la manipulación con robots, al integrar en un único dispositivo sensores visuales, térmicos, táctiles, de fuerza y de orientación.
Una mano que siente el mundo como nosotros
Hasta ahora, la mayoría de las manos robóticas estaban diseñadas con sensores táctiles simples o con cámaras externas que ayudaban a guiar los movimientos. Pero estas soluciones eran insuficientes para tareas más complejas o peligrosas, como manipular objetos calientes, distinguir entre materiales similares o adaptarse a pequeños cambios en el entorno. La MOTIF Hand busca llenar ese vacío.
Diseñada sobre la base del modelo LEAP Hand, una plataforma robótica ya popular en el ámbito académico por su eficiencia y bajo coste, la MOTIF va un paso más allá: añade una cámara térmica, sensores inerciales en cada articulación, una cámara RGB de alta resolución y sensores de profundidad.
Todo ello está integrado en una estructura ligera y accesible desde el punto de vista económico. Así es, la mano puede fabricarse por menos de 4.000 dólares y su diseño será de código abierto, lo que facilita su adopción por parte de laboratorios, universidades y desarrolladores independientes.
Una arquitectura sensorial digna de un organismo vivo
La complejidad técnica de la MOTIF Hand recuerda, en cierto sentido, a la mano humana. Cada dedo está recubierto por sensores táctiles que detectan la presión mediante materiales con resistencia variable. Aunque los sensores aún no llegan hasta las yemas, los investigadores planean integrar en el futuro sensores de alta precisión, como el Digit 360, especializado en tacto robótico.
Cada articulación del dedo incluye un conjunto de sensores inerciales: acelerómetros, giroscopios y magnetómetros. Esta combinación de sensores permite medir en tiempo real los movimientos y fuerzas que experimenta la mano, un detalle clave para realizar tareas dinámicas o detectar resistencias inesperadas al interactuar con objetos, según cuentan los autores en el estudio publicado en el repositorio open access de investigación científica ArXiv.
El cerebro de la mano es un Raspberry Pi 5, un microordenador que procesa los datos de todos estos sensores, incluidos los de una cámara térmica FLIR Lepton 3.5, que detecta temperaturas con una resolución interpolada de hasta 1280×960); y una cámara RGB capaz de grabar a 30 fotogramas por segundo. Toda esta información es transmitida al sistema central mediante una red de buses y puertos USB-C.
El sensor táctil Digit 360, con forma de dedo artificial, digitaliza el tacto con una precisión similar a la humana. Con más de 18 funciones sensoriales, detecta detalles de hasta 7 micras y fuerzas mínimas de 1 milinewton, procesando la información táctil hasta 30 veces más rápido que una persona. Una nueva referencia en tecnología háptica que podría integrarse en MOTIF Hand. Cortesía: Meta
Manipulación segura de objetos calientes
Una de las principales innovaciones de esta mano es su capacidad para integrar la información térmica en la toma de decisiones al manipular objetos. Esto no es una simple cuestión técnica: en entornos como cocinas, fábricas y laboratorios, reconocer zonas calientes o frías es vital para evitar accidentes o errores.
Hanyang Zhou, Haozhe Lou, Wenhao Liu y sus colegas de la Universidad del Sur de California desarrollaron un proceso llamada Real2Sim, en la que la mano captura múltiples imágenes desde distintos ángulos, reconstruye un modelo tridimensional del objeto y superpone sobre él un mapa térmico. Este modelo no solo sirve para visualización, sino que se usa para entrenar al sistema a evitar zonas peligrosas al agarrar objetos calientes.
«Por ejemplo, si una lata contiene un líquido caliente, la cámara térmica puede detectar la zona superior con mayor temperatura y evitar que los dedos entren en contacto con ella —dice Zhou. Y añade—: A través de aprendizaje por imitación, usando demostraciones humanas, entrenamos a la mano para elegir puntos de agarre seguros».
Esta estrategia de evitar zonas con riesgo térmico se implementa incluso en simuladores como el MuJoCo, donde los algoritmos de aprendizaje perfeccionan las decisiones antes de llevarlas al mundo físico.
Clasificación de objetos por masa con un «golpecito»
Otro experimento fascinante demuestra cómo la MOTIF Hand puede distinguir objetos idénticos en apariencia pero con masas diferentes. ¿La técnica? Un simple golpecito con la yema del dedo, como haría cualquier persona para tantear el peso de algo.
En el experimento, la mano robótica golpea tres objetos en forma de U hechos del mismo material, pero con diferentes pesos: 82, 125 y 219 gramos. Utilizando la información de los sensores inerciales —acelerómetros, giroscopios y magnetómetros— ubicados cerca del punto de contacto, los investigadores midieron cómo varía la aceleración y la respuesta del dedo en función del peso del objeto.
Luego, mediante un análisis estadístico, conocido como Linear Discriminant Analysis, Zhou y su equipo identificaron 42 características clave que permitieron clasificar los objetos con alta precisión. El sistema aprendió, por ejemplo, que los objetos más pesados provocan una aceleración negativa más pronunciada en el eje Z durante el impacto, lo cual tiene sentido biomecánico. Esta sensibilidad permite distinguir diferencias de peso sin necesidad de levantar el objeto.
¿Qué diferencia MOTIF Hand de otras manos robóticas?
| Característica | MOTIF Hand | Manos robóticas tradicionales |
|---|---|---|
| Sensor térmico | ✅ Sí | ❌ No |
| IMU por dedo | ✅ Sí | ❌ Limitado |
| Tacto distribuido | ✅ Denso | ✅ Parcial |
| Visión + térmico + fuerza | ✅ Integrado | ❌ Generalmente separados |
| Bajo coste y open-source | ✅ Sí | ❌ No siempre |
¿Para qué sirve una mano robótica con percepción térmica y táctil?
El equipo de la Universidad del Sur de California no se detiene en lo técnico. Una parte importante del trabajo aborda las posibles aplicaciones reales de esta tecnología:
✅ Robótica de cocina. En la cocina, por ejemplo, donde los objetos pueden estar calientes, mojados o resbaladizos, la visión por computadora tradicional no es suficiente. Pero una mano robótica que siente el calor, la presión y el peso puede adaptarse mejor a estas condiciones cambiantes.
✅ Fábricas inteligentes. En la industria, tareas como soldar o apretar tornillos requieren precisión, fuerza controlada y, en algunos casos, evitar zonas calientes. El uso de sensores térmicos y de torque puede marcar la diferencia entre un trabajo exitoso y uno defectuoso.
✅ Investigación científica y medicina. MOTIF Hand puede optimizar la manipulación precisa de instrumentos, muestras o tejidos sensibles. Además, la MOTIF Hand está diseñada con una visión de código abierto. Esto significa que otros investigadores podrán replicar y mejorar su diseño, acelerando la innovación en el campo de la robótica háptica.
El equipo ya planea nuevas versiones con sensores en las yemas de los dedos y una mejor integración de datos en tiempo real.
Un paso más cerca de la inteligencia encarnada
La MOTIF Hand es un paso decisivo hacia lo que los investigadores llaman inteligencia encarnada: robots que no solo ven su entorno, sino que lo sienten, lo interpretan y lo adaptan de manera física.
Esto cambia el paradigma: no hablamos solo de visión artificial, sino de una percepción robótica multimodal con sentido del tacto, del peso y de la temperatura.
«Manipular un objeto no es solo agarrarlo. Es saber cómo, dónde y con qué fuerza hacerlo», explica el equipo del SLURM Lab.
El tacto, la temperatura y la fuerza son dimensiones fundamentales de la experiencia humana. Traducir estas capacidades a los robots no solo mejora su rendimiento técnico, sino que también los hace más comprensibles y seguros para colaborar con humanos en entornos reales.
El futuro de la robótica no está en manos invisibles que actúan desde las sombras, sino en manos como la MOTIF: visibles, inteligentes y sensoriales. Y con ellas, las máquinas inteligentes empiezan a tocar el mundo con más humanidad. ▪️
Fuente: Hanyang Zhou et al. The MOTIF Hand: A Robotic Hand for Multimodal Observations with Thermal, Inertial, and Force Sensors. ArXiv (2025). DOI: https://doi.org/10.48550/arXiv.2506.19201