

Los humanos también poseemos un «séptimo sentido» de tacto remoto, similar al de algunas aves
Un estudio demuestra por primera vez que los seres humanos podemos detectar objetos sin tocarlos, una capacidad antes observada solo en ciertos animales, como en las aves conocidas como correlimos.
Por Enrique Coperías

Los participantes del estudio movieron los dedos suavemente sobre arena para detectar un objeto oculto antes de tocarlo, y revelaron una sorprendente sensibilidad táctil para localizarlo. Imagen generada con DALL-E
Un equipo de investigadores de la Queen Mary University of London y el University College de Londres, en el Reino Unido, ha descubierto que poseemos una suerte de tacto remoto: la capacidad de detectar objetos sin contacto directo.
Es la primera vez que se demuestra la existencia de este sentido en nuestra especie, una habilidad que hasta ahora solo se había observado en algunos animales, como los correlimos y otras aves playeras.
El tacto humano se considera habitualmente un sentido de proximidad, limitado a lo que la piel contacta de forma física. Sin embargo, varios estudios científicos en animales han empezado a cuestionar esa frontera. Ciertas aves limícolas, como los chorlitejos y los correlimos, son capaces de localizar presas escondidas bajo la arena gracias a un tipo de tacto remoto. Este les permite percibir vibraciones o desplazamientos mecánicos transmitidos por el sedimento cuando aplican presión con el pico.
Un nuevo sentido: el tacto remoto humano
Inspirándose en esos mecanismos, los investigadores quisieron comprobar si los humanos podrían poseer una sensibilidad táctil similar. En el estudio, presentado en la IEEE International Conference on Development and Learning (ICDL), que se celebró en Praga entre los días 16 y 19 de septiembre, los participantes movieron suavemente los dedos sobre arena para intentar localizar un pequeño cubo oculto antes de tocarlo.
Los resultados sorprendieron incluso a los científicos: las personas fueron capaces de detectar la presencia de un objeto enterrado con una precisión comparable a la de las aves, pese a no contar con las estructuras especializadas de sus picos.
Mediante un modelo físico del fenómeno, el equipo demostró que las manos humanas son mucho más sensibles de lo que se pensaba. Los dedos lograron percibir desplazamientos ínfimos en el entorno arenoso, casi en el límite de lo que la física predice que puede detectarse.
Cómo funciona el tacto remoto en humanos
«Nuestros resultados muestran que el ser humano puede captar las reflexiones mecánicas que genera un objeto enterrado cuando el material que lo rodea se desplaza —explica la psicóloga Elisabetta Versace, responsable del Prepared Minds Lab en la Queen Mary University of London y principal impulsora del experimento. Y añade—: Es la primera vez que se estudia el tacto remoto en humanos, y esto cambia nuestra concepción del campo perceptivo, lo que en neurociencia se denomina el receptive field, en los seres vivos, incluidos nosotros mismos».
El equipo comparó además el rendimiento humano con el de un brazo robótico equipado con sensores táctiles y entrenado mediante un algoritmo de memoria LSTM (Long Short-Term Memory).
Los voluntarios humanos alcanzaron una precisión media del 70,7 % dentro del rango esperable, mientras que el robot pudo detectar objetos a algo más de distancia, pero con numerosos falsos positivos y solo un 40 % de acierto global. «Ambos sistemas operaron cerca del límite teórico de sensibilidad que predicen los modelos físicos», señala el estudio.
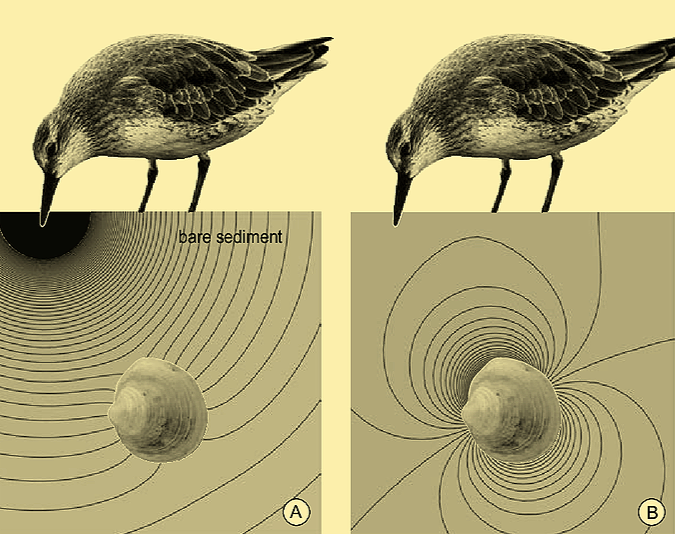
Un correlimos gordo (Calidris canutus) genera un campo de presión con su pico al introducirlo en el sedimento arenoso de un lodazal hipotético. Cortesía: Jimmy de Fouw / Radboud University
Implicaciones científicas y tecnológicas
El hallazgo, subrayan los investigadores, amplía los límites de lo que entendemos por sentido del tacto humano. «Este descubrimiento abre nuevas posibilidades para diseñar herramientas y tecnologías asistivas que amplíen la percepción táctil humana», apunta Zhengqi Chen, doctorando del Advanced Robotics Lab y primer autor del trabajo.
En palabras de Chen, «podría aplicarse al desarrollo de robots capaces de realizar operaciones delicadas, como localizar artefactos arqueológicos sin dañarlos, o explorar suelos granulares como los del planeta Marte o los fondos oceánicos. En general, es un paso hacia sistemas basados en el tacto que hagan la exploración oculta o peligrosa más segura, inteligente y eficaz».
Para Lorenzo Jamone, profesor asociado de Robótica e Inteligencia Artificial en el University College London, la clave del estudio está en la colaboración interdisciplinar. «Lo más emocionante es cómo los experimentos humanos y robóticos se retroalimentaron entre sí —dice este ingeniero—. Los datos humanos sirvieron para entrenar al robot, y el análisis del robot ayudó a interpretar mejor el comportamiento humano. Es un ejemplo claro de cómo la psicología, la robótica y la inteligencia artificial pueden unirse para impulsar tanto descubrimientos científicos como innovaciones tecnológicas».
El trabajo se compone de dos estudios complementarios: uno con humanos, centrado en la sensibilidad de las yemas de los dedos ante objetos enterrados, y otro con un brazo robótico dotado de sensores táctiles. En ambos casos, los resultados revelan una sensibilidad sorprendente frente a señales mecánicas mínimas, lo que sugiere que los humanos pueden sentir más allá del contacto físico directo.
Información facilitada por la Queen Mary University of London
Fuente: Zhengqi Chen, Laura Crucianelli, Elisabetta Versace,Lorenzo Jamone. Exploring Tactile Perception for Object Localization in Granular Media: A Human and Robotic Study. IEEE (2025). DOI: 10.1109/ICDL63968.2025.11204359